By Seung-min Jeon WIRED Korea
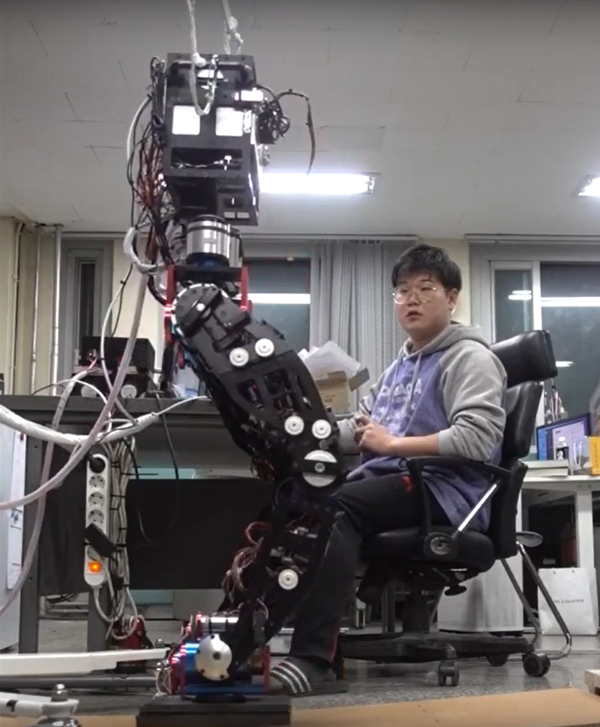
With its electric motors whirring and vibrating, a two-legged black robot with the torso and the lower extremity is laboriously taking one step upward after another on an inclined plywood board. The humanoid test is being conducted at Kookmin University in Seoul --- a scene that is not unfamiliar to this reporter, who has long been covering research on robotics.
The plywood board has an 8-degree inclination, neither too low nor too high. It has as high an inclination as a ski slope for those with an intermediate level of skiing skills.
It should not be too hard to for the robot to climb the board, given that the highest degrees of inclination for a climbing humanoid have so far been no higher than 12 degrees. There appears to be nothing spectacular about it.
“What’s all this fuss about? That’s what I’m asking,” I told Cho Back-kyu, professor of mechanical engineering at Kookmin University, who heads a research team in charge of developing and testing the robot. But Professor Cho took no time in retorting: “What you are talking about is sheer nonsense. You have no idea what the robot is like.”
Why is it so difficult for Cho’s humanoid to walk up what appears to be an easy-to-climb slope? The reason is that it has no inertial measurement unit, an electronic device that measures the robot’s non-gravitational force, angular rate and orientation.
IMUs are critical components for humanoids. Almost all humanoids are equipped with them. Cho acknowledges it when he says, “We need to continue to use them because they have so many advantages.”
But one problem with IMUs is that they have errors in measurement. Though IMUs make it easier for humanoids to walk on inclined paths, the measurement errors make two-legged robots wobble when they walk.
To surmount those measurement errors, Professor Cho and his RC Lab team decided to do away with IMUs and use different devices to measure the torque applied to the humanoid’s ankles and use the measurements thus obtained to calculate the degrees of inclination for stable walking. Cho said, “We need an alternative approach because it is not unusual for IMUs to malfunction or break down.”
Now I am watching a humanoid with electric motors as its actuators walk up a slope without the aid of IMUs, marking the birth of a new type of humanoid.
It would be a hyperbole to claim that the successful experiment is a milestone in the annals of robot history. But who would believe that the research has been conducted with no grant from either government agencies or private organizations.
A project of research on robotics with no adequate funding is more of a norm than of an exception in Korea. Participants in such a project, many of them being researchers in their early or mid-20s, work in crammed space, using parts and components left over from previous projects. It goes without saying that they are not properly rewarded for their work.
Funding is the major problem with research on humanoids in Korea. It is not appealing to potential private investors because humanoids with the current level of behavioral skills have little practical use in factories or any other industrial sites.
Nor is the government willing to provide humanoid researchers with grants. It is saying humanoid development does not belong to basic sciences on which research it is required to fund with taxpayers’ money.
What many researchers do under these circumstances is to take orders from corporations to develop mechanical devices and save money and spare parts from such projects for use in humanoid research that they are set to carry out later on.
The problem of funding has dogged Professor Oh Jun-ho of the Korea Advanced Institute of Science and Technology, the now-famous forerunner in research on humanoids in Korea. Professor Oh, who developed Hubo, the first humanoid in Korea, has played a leading role in humanoid research during the past 15 years.
The crowning moment of his research came when his KAIST Humanoid Robot Research Center team won the DARPA Robotics Challenge, a major U.S. competition that was sponsored by the Defense Advanced Research Projects Agency in 2015. But his achievement was not of much use in securing funds to his humanoid research.
Oh says he too has had funding problems. “I have had no long-term funding for any of my projects,” he said to me a few years ago. “I have saved money from my services for private corporations (for my later research on humanoids).”
The Kookmin University team has not fared any better, though its head, Cho, was an influential figure. Cho, who studied robotics under the supervision of Professor Oh, is renowned for having developed a running humanoid, the first in Korea. What he and his RC Lab team has been working on is the ROK humanoid series.
ROK-1, which had just a frame and nothing else, was designed for the purpose of conducting an experiment. ROK-2 was an unusual robot built with a grant, a skiing robot designed for an entry in a “ski robot challenge” competition held during the 2018 Pyeongchang Winter Olympics.
A real humanoid is ROK-3, which Professor Cho has recently tested. “For research on the humanoid, I’m using what is left over from the 100 million won ($86,000) grant I received from the university in 2016,” he said. “I was allowed to use the money on whatever project I was to carry out.”
In addition to KAIST and Kookmin University, Seoul National University, Hanyang University and Seoul National University of Science and Technology have researchers engaged in humanoid projects.
Among the researchers is Han Jae-kwon, a professor of interdisciplinary engineering systems at Hanyang University, who leads the HERoEHS research team. He is a robot expert who was trained by Denis Hong, a world-renowned Korean-American robot scientist at University of California at Los Angeles.
Professor Han took his desk out from the crammed research room and placed a 3D printer and a laser cutter in its place for the manufacture of parts. When his team was preparing to participate in the 2008 ski robot competition, he had obtained a small amount of financial support. When the money was used up, he ran a campaign to collect contributions from the general public to build Diana, a humanoid capable of skiing like humans.
Now Han and his team are developing a soccer robot for the 2020 RoboCup competition in Paris. Here again, funding is a major problem. “Research on humanoids should be categorized into basic science and technology research (eligible for grants from the government),” he says.
Against this backdrop, Korean researchers are working hard on humanoid development so that they will not be left behind in the unrelenting race for research on robotics.
*****
The above is a translation of Seung-min Jeon’s Korean-language article by Nam-hyun Choi, deputy editor in chief at WIRED Korea.