미국 로봇 기업 보스턴다이나믹스가 휴머노이드(인간형) 로봇 ‘아틀라스’(Atlas)를 공개하자 전 세계 로봇공학자들이 받은 충격은 결코 적지 않다. 다른 인간형 로봇에서는 볼 수 없는 압도적인 운동성능을 자랑하기 때문이다.
아틀라스는 울퉁불퉁한 길을 걷거나 달리고, 창고에서 짐을 정리해 보였다. 허리높이의 구조물을 한 달음에 뛰어 올라가고, 뒤로 한 바퀴 재주를 넘는 ‘백플립’까지 해치웠다. 최근 공개된 영상에선 바닥에서 한 바퀴 구른 다음 다시 일어나 ‘앞구르기’ 동작을 시연해 보이기도 했다.
아틀라스를 비롯해 강아지형 로봇 ‘스팟’ 등 보스턴다이나믹스가 개발한 로봇은 모두 비슷한 운동 능력을 자랑하고 있다. 로봇의 운동능력을 높이는 분야에서 이 회사가 독보적이라는 사실에 이의를 제기하는 전문가는 거의 없다. ‘인간형 로봇 기술의 발전방향’에 대해 한 가지 길을 제시하고 있는 셈이다.
인간형 로봇 기술을 한층 더 발전시키기 위해서는 어떤 연구가 필요할까. 로봇 공학자들은 로봇의 운동성능을 한층 더 강화하기 위해 로봇의 구동장치(액추에이터)를 근본부터 다시 연구해야 할 필요가 있다고 보고 있다.
이밖에 효율 높은 배터리 기술, 인공지능을 기반으로 한 로봇의 인지능력 개선, 초고속 통신망을 이용한 원격제어 기능 등도 미래형 인간형 로봇의 숙제라는 평가가 나온다.
◆대세는 유압식, 동물과 비슷한 운동능력 구현
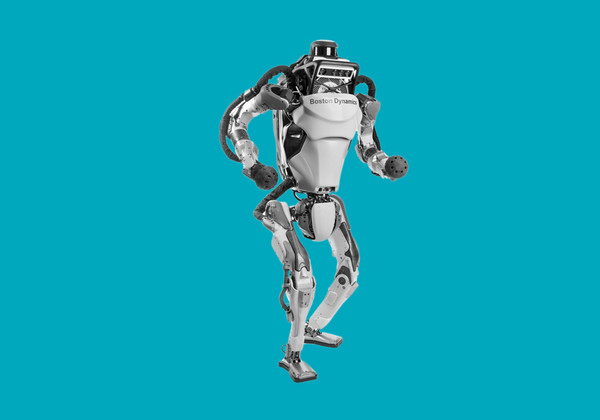
아틀라스를 살펴보면 몸통의 부피는 크고, 팔다리는 상대적으로 가늘다. 몸통 속에 기름의 압력을 만드는 유압펌프를 내장하고 있다. 팔 다리가 가늘어진 건 전기모터를 빼고 가느다란 유압식 액추에이터가 들어있기 때문이다. 전기모터를 내장해야 하니 팔 다리가 굵던 기존 로봇들과 생김새가 다른 편이다.
유압식 액추에이터는 마치 주사기처럼 생겼다. 가느다란 관 속에 기름을 채워 넣어 뻗어나가는 힘을 이용해 로봇을 조작한다. 기름은 힘을 주어 누르면 압축된다. 같은 양의 기름을 같은 시간 안에 채워 넣어도 상황에 따라 로봇의 움직임에 차이가 생길 수 밖에 없다. 기계공학자들은 “같은 일을 하는 기계장치를 유압식 대신 전기모터식으로 만들라고 하면 작업이 훨씬 수월하게 느껴진다”고 했다.

이렇게 작업이 복잡한데도 굳이 유압식을 쓰는 이유는 뭘까. 먼저 전기모터방식에 비해 압도적으로 큰 힘을 낼 수 있기 때문이다. 또 유압식은 로봇의 뼈대를 먼저 만든 다음 그 주위에 액추에이터를 붙여서 만들어야 한다. 뼈 주위에 붙은 근육을 써서 움직이는 동물의 운동능력을 흉내는데 가장 적합하다.
유압식 로봇은 온 몸의 힘을 자유자재로 사용할 수 있는 것도 큰 장점이다. 몸통 속에 있는 유압펌프에서 대부분의 출력이 나오기 때문에 한쪽 팔이나 한쪽 어깨 등, 필요한 부분에 모든 힘을 몰아 주거나, 온 몸에 골고루 힘을 보낼 수도 있다. 한쪽 발에만 힘을 주어 중심을 잡도록 만드는 등, 동물과 훨씬 비슷한 동작이 가능해지는 셈이다.
유압식은 소형·경량화가 쉽지 않아 굴삭기 등 대형 장비에 주로 쓰였다. 로봇개발 과정에서 전기모터가 대세였던 시대에 보스턴다이나믹스가 혁신의 방향을 제시한 셈이다. 지금은 보스턴다이나믹스 이외에도 여러 로봇 연구자들도 유압식을 연구하고 있다.
한국에서 유압식 로봇기술이 가장 뛰어난 곳으로는 ‘한국생산기술연구원(생기원)’이 꼽힌다. 인간형 로봇은 개발한 바 없지만 네 발로 걸어다니는 당나귀형 로봇 ‘진풍’을 개발해 화제가 된 바 있다. 최근엔 다양한 군사용 로봇 기술을 개발 중이다.
생기원 연구진에 따르면 유압식은 제어기술을 확보하기 어렵지만, 일단 개발에 성공하고 나면 장점이 더 크다. 동력원을 모두 몸통에 집어넣는 게 오히려 안정적일 수 있기 때문이다. 팔, 다리를 두껍게 만들었던 기존 로봇들은 천천히 걸을 땐 유리할 수 있지만, 걷거나 뛰는 행동을 하는 데에는 불리하다.
생기원 조정산 유압로봇팀장은 “유압식은 생체모방을 잘 한 시스템이라 휴머노이드 로봇처럼 자립형 로봇에 유용하게 쓰일 것”이라며 “앞으로는 지금보다 더 소형화 된 고성능 액추에이터를 개발하는 등의 연구가 필요하다”고 말했다.
◆에너지 효율 높이고 고성능 두뇌도 개발해야
인간형 로봇 개발과정에 꼭 필요한 숙제로 ‘배터리 기술’을 꼽는 경우도 많다. 최초의 인간형 로봇 ‘아시모’에 전기모터가 들어간 이후, 아틀라스 이외의 인간형 로봇은 대부분 전기모터를 이용한다. 유압식의 장점이 크지만 전기모터 방식도 무시하기 어려워 두 분야 모두 꾸준한 연구가 필요하기 때문이다.
전기모터식 로봇은 에너지가 많이 필요하다. 만약 로봇의 팔꿈치에 50W(와트), 손목에 30W 짜리 모터가 들어갔다면 그 팔을 들기 위해 로봇의 어깨에는 80W보다 더 큰 에너지가 필요해진다. 5kg의 물체를 들기 위해 팔 전체가 낼 수 있는 힘은 18~20kg를 넘도록 설계하는 식이다. 결국 전체에너지의 60~70%를 몸통의 균형을 유지시키는 데 들어가게 된다.
이 때문에 전기모터식 로봇의 운동능력과 시간을 확보하려면 배터리 기술 확보가 필수다. 현재까지 개발된 축전능력으로는 그만큼 에너지를 다 담아낼 수 없기 때문이다.
한양대 한재권 로봇공학과 교수는 “지금 시스템은 모터가 많은 에너지를 쓰고 있기 때문에 24시간 움직이는 로봇을 만들기 어렵다”면서 “저전력 모터 기술, 고효율 배터리 기술이 획기적으로 발전할 필요가 있다”고 말했다.
인간형 로봇 기술 혁신을 위해선 운동능력 개발도 중요하지만 로봇의 ‘인지능력’ 개선에도 많은 관심을 기울여야 한다는 주장도 많다. 사람의 말을 알아듣고 움직이려면 결국 주위 상황을 스스로 판단하고 움직여야 하기 때문이다.
국내 로봇기업 ‘네이버랩스’는 2019 국제전자제품박람회(CES)에서 5G(5세대) 무선통신을 활용한 ‘브레인리스 로봇’을 선보였다. 로봇의 주요 인지기능을 고성능 서버에 탑재해 원격으로 조종하며 로봇의 행동을 보다 매끄럽게 만드는 기술이다.
기존 인간형 로봇은 센서에서 얻은 데이터를 바탕으로 로봇에 내장된 컴퓨터로 처리했지만 소형 개인용 컴퓨터에 의존할 수 밖에 없어 데이터 처리에 시간이 걸렸다. 5G 등 고성능 통신망이 자리잡으면서 이런 원격 제어 기술은 한층 더 발전할 것으로 보인다.